Το line tracking χρησιμοποιείται συνήθως σε εφαρμογές pick-and-place. Τα αντικείμενα συλλέγονται εν κινήσει από έναν ιμάντα/ταινία και τοποθετούνται σε μία άλλη περιοχή, είτε κινούμενη είτε στατική. Η παλμογεννήτρια του ιμάντα/ταινίας στέλνει απευθείας τα δεδομένα στον controller του ρομπότ και, σε συνδυασμό με οπτικά συστήματα ή κάμερες, βρίσκει ευρεία εφαρμογή σε έναν αυξανόμενο αριθμό βιομηχανιών.
Το line tracking σε συνδυασμό με 2D ή 3D οπτικό σύστημα μπορεί να μας βοηθήσει να εντοπίσουμε, να παρακολουθήσουμε και να επεξεργαστούμε προϊόντα και διαδικασίες εν κινήσει, χωρίς περιττά σταματήματα και καθυστερήσεις.
Πώς ακριβώς δουλεύει το line tracking; Ακολουθεί ένα παράδειγμα εφαρμογής μας…
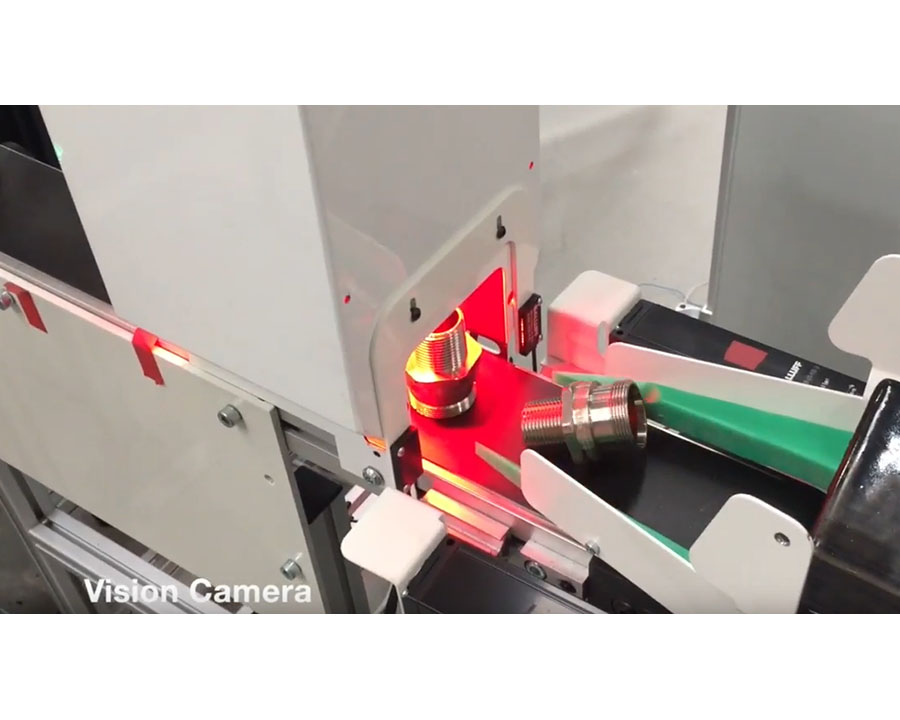
Σύστημα τροφοδοσίας παρέχει τα προϊόντα σε μεγάλες ποσότητες πάνω σε έναν ιμάντα, όπου περνούν με τυχαίο προσανατολισμό μπροστά από το ρομπότ. Ένα plc ελέγχει πλήρως όλη τη διαδικασία και όλα τα διαφορετικά σε μέγεθος και σχήμα έρχονται από τον αυτόματο τροφοδότη. Το οπτικό σύστημα (3D vision) αναγνωρίζει το κάθε εξάρτημα ως σχήμα και θέση/γωνιά εισόδου πάνω στον ιμάντα. Έπειτα το ρομπότ, έχοντας τις συντεταγμένες από το οπτικό σύστημα, αυτόματα παραλαμβάνει τα εξαρτήματα από τον ιμάντα και τα εναποθέτει μέσα στην αυτόματη μηχανή.